Today everyone has a Wifi (WLAN)-router at home connected to the internet. So it seems natural to monitor and control the automower robot through the WLAN radio interface: this is now possible!
The hardware basis of the WLAN-modul is a mini router "Fonera 2.0", type 2200 or 2100. Those routers have been distributed per hundred of thousands through the "FON community network" until 2008, see http://fr.wikipedia.org/wiki/FON. It is quite easy to find them at a second hand shop (ebay ...)
The fonera router will be embedded inside the Automower robot, either under the robot keyboard like in the following video or near to the right wheel. It will be completely protected from rain, dirt and also heat. Due to its external WiFi antenna, it has a very good radio range for low power consumption: 3W 150mA on 20V is acceptable compared to 27W consumed by the robot at work.
Simply have a look at following video to see how easy it is to setup the interface in a few minutes:
The small round gray box on next picture is the power supply of the fonera
that is connected to the robot through the white connector of the mother board
(this connection is fully equivalent to the serial external port at the botom
of the robot, but the connector here at the mother board has a better protection
from dust and humidity):

If you want, you can also put the fonera under the green hood, near to the stop button, this way it remains accessible and you can also see the small green leds for power and wlan.

For those who want to put the fonera at the front of the robot, it is also possible:

For the software part, everything works now like if the robot would be an element of the IP network. This means that the robot will be accessible through its own IP and a specific IP-port that is bridged to its serial interface. Therefore the robot becomes accessible from everywhere! From a local PC at home, from a PDA, a smartphone connected to the internet at the other end of the planet!
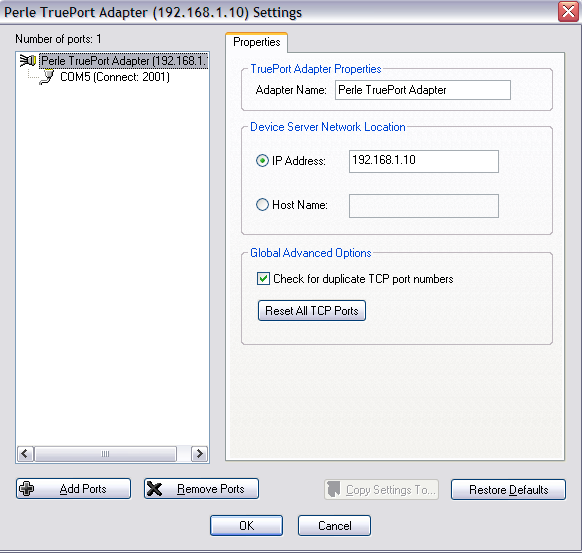
Let's start with the simplest case: a direct monitoring of the robot through a local PC at home. In order to use PC-software that monitors the robot through a real serial interface, we just need to install the free software Perle True Port .
This software emulates a serial port on the local PC. It is available for windows and linux systems. This virtual serial port will be the serial port of the robot exactly as if the robot would be directly connected to the PC through a local serial cable. At configuration, it will just be necessary to indicate the robots IP (here 192.168.1.10 in the exemple) and the IP-port (2001).



As soon as the virtual serial port is established (here COM5), we can test the link to the robot through a small software that displays the temperature and the voltage of the battery. It is also possible to give certain orders to the robot, for example "go home!" or "go to work!". This is the most simple example of robot control. Of course you can also control the robot in real time if you have a webcam fixed on the robot, see this video: http://www.youtube.com/watch?v=MqIHruVACj0.

Instead of Perle True Port, you can also use the free software HW VSP3 . In that case the configuration is even easier, you just need to indicate the IP adress ( 192.168.1.200 in following example) and the IP port (2001):

A third free possibility and even with more powerfull features seems to be VIRTUAL SERIAL PORT EMULATOR from Eterlogic, but I have not tested it.
If you are interested by this WLAN modul, you can contact me through the link below: